2026
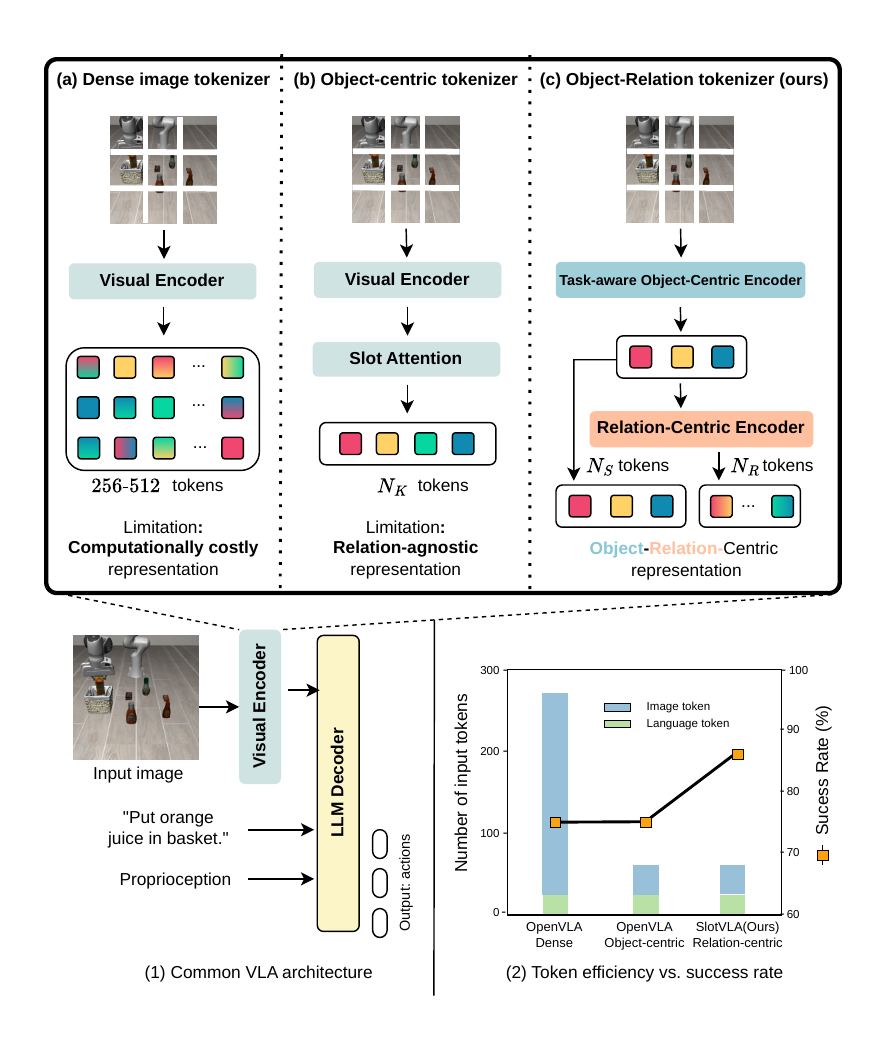
SlotVLA: Towards Modeling of Object-Relation Representations in Robotic Manipulation
A slot-attention-based VLA framework for compact object-relation representations in robotic manipulation.

M.S. Student in Computer Science · AICV Lab, University of Arkansas
I am a master's student in Computer Science at the University of Arkansas, where I am a member of the AICV Lab, supervised by Dr. Ngan Le. I received my Honors B.S. in Computer Science from the University of Arkansas.
A slot-attention-based VLA framework for compact object-relation representations in robotic manipulation.
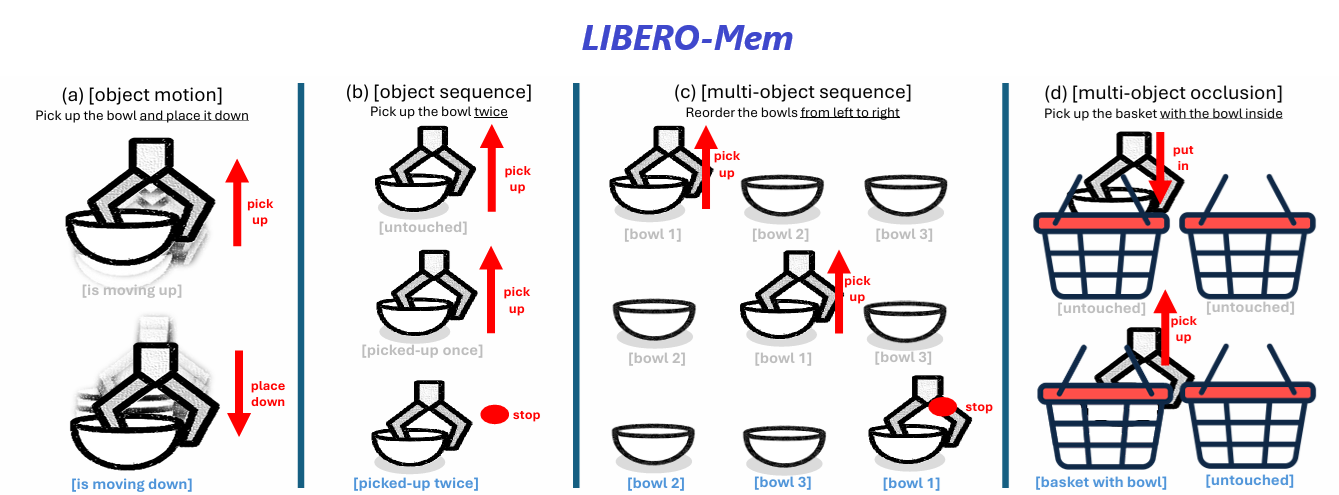
A non-Markovian manipulation benchmark and slot-centric VLA framework for memory-aware robot policies.
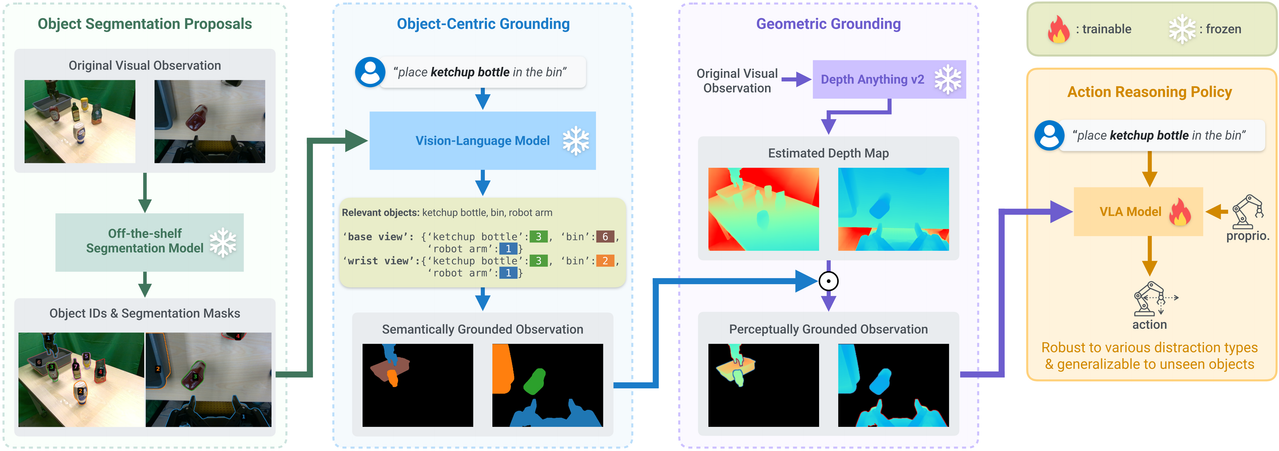
A VLA framework that separates perceptual grounding from action reasoning for clutter-resistant robot manipulation.
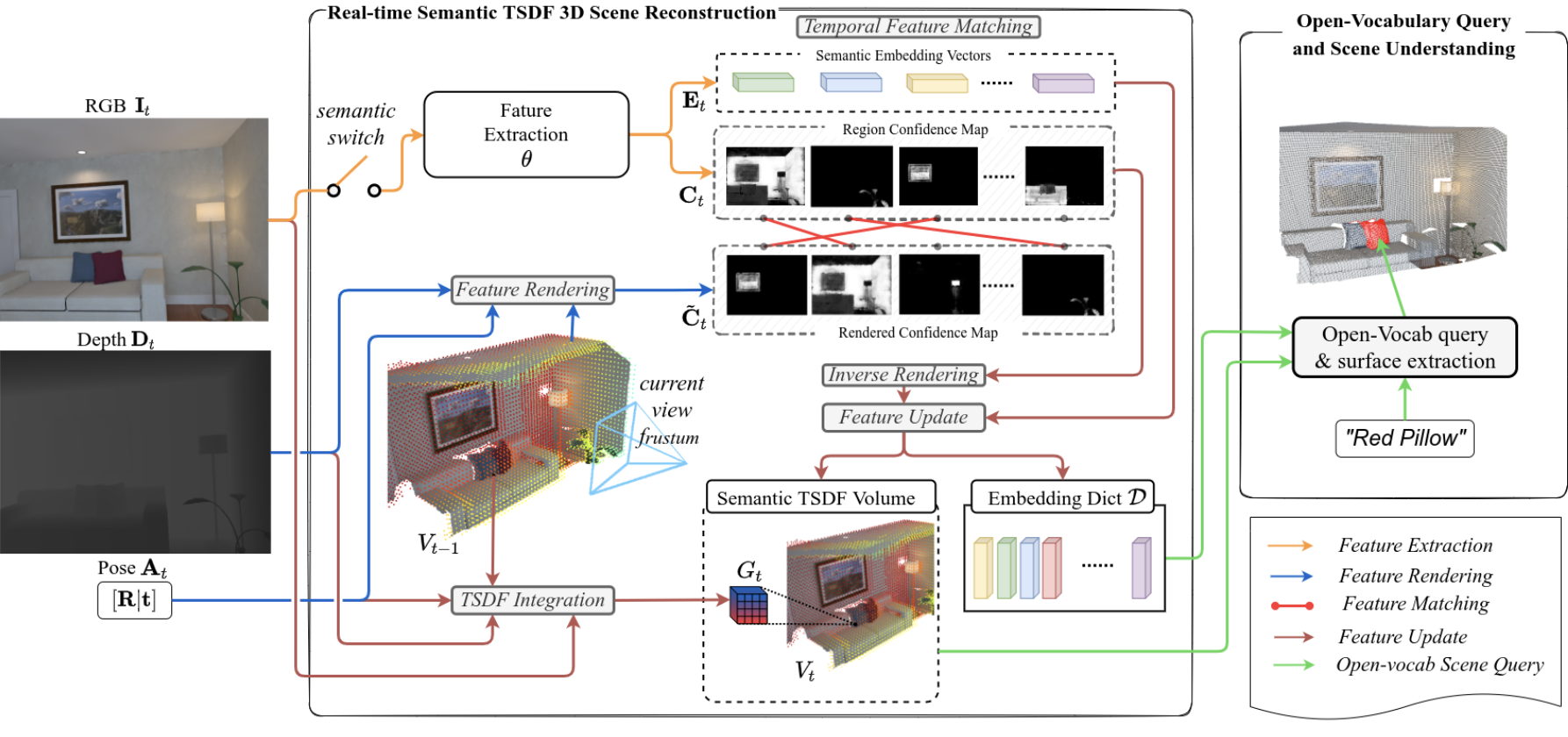
Real-time open-vocabulary 3D mapping and queryable scene representation from RGB-D observations.
A slot-attention-based VLA framework for compact object-relation representations in robotic manipulation.
A non-Markovian VLA framework that combines persistent semantic-graph state with executable code-as-planner reasoning.
A memory-aware robotic manipulation benchmark and slot-centric VLA model for non-Markovian manipulation tasks.
A VLA framework that uses object-centric and geometry-grounded views for clutter-resistant robot manipulation.
A multi-scale Transformer approach for solar PV profiling and obstruction localization for degradation mitigation.
A multi-resolution Transformer for semantic segmentation of aerial imagery.
Real-time open-vocabulary 3D mapping and queryable scene representation using RGB-D observations.
A multi-scale Transformer model for solar PV profiling from aerial imagery.